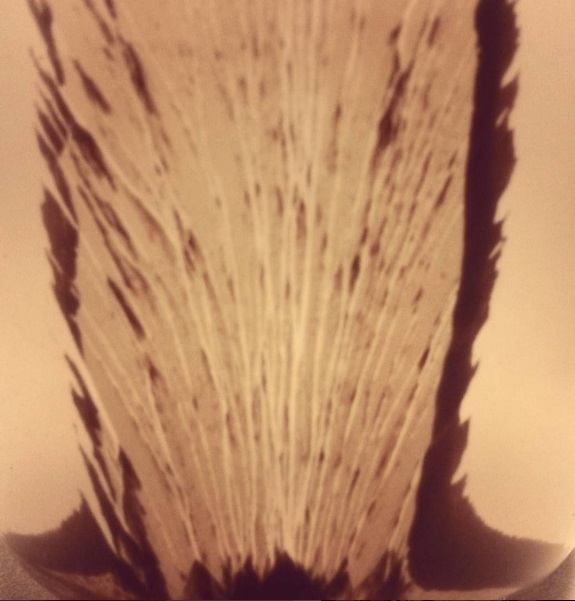
1er prix du jury
Aisha Kanzari : L’origine du mouvement
Le titre de cette œuvre est un clin d’œil au célèbre tableau de Gustave Courbet, la forme capturée pouvant rappeler le mont de Vénus. Cette photo invite l’observateur à s’interroger sur la nature du mouvement à l’origine de cette forme. Elle capture une forme d’éclat, de fontaine, ou de geyser, témoin d’un mouvement passé.